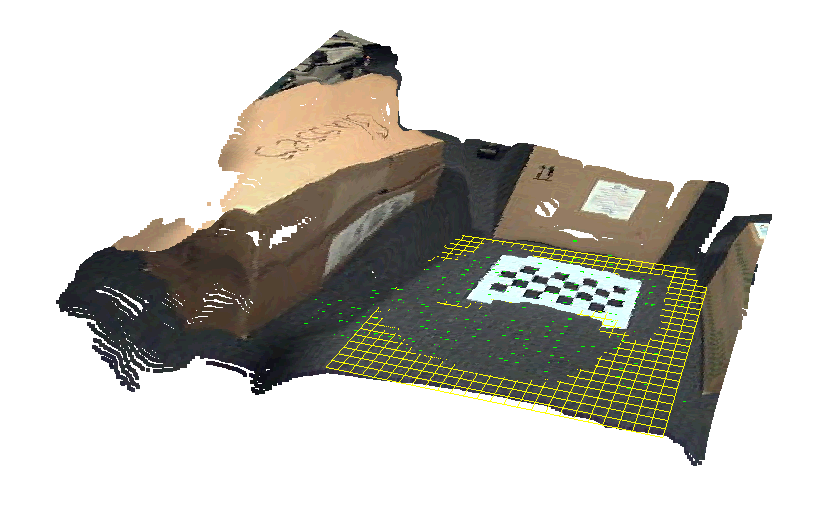
Just a snippet of code if someone out there needs it. I keep coming back to it, so I thought why not share it…
#include <iostream>
#ifndef WIN32
#include <dirent.h>
#endif
using namespace std;
void open_imgs_dir(char* dir_name, std::vector<std::string>& file_names) {
if (dir_name == NULL) {
return;
}
string dir_name_ = string(dir_name);
vector<string> files_;
#ifndef WIN32
//open a directory the POSIX way
DIR *dp;
struct dirent *ep;
dp = opendir (dir_name);
if (dp != NULL)
{
while (ep = readdir (dp)) {
if (ep->d_name[0] != '.')
files_.push_back(ep->d_name);
}
(void) closedir (dp);
}
else {
cerr << ("Couldn't open the directory");
return;
}
#else
//open a directory the WIN32 way
HANDLE hFind = INVALID_HANDLE_VALUE;
WIN32_FIND_DATA fdata;
if(dir_name_[dir_name_.size()-1] == '\\' || dir_name_[dir_name_.size()-1] == '/') {
dir_name_ = dir_name_.substr(0,dir_name_.size()-1);
}
hFind = FindFirstFile(string(dir_name_).append("\\*").c_str(), &fdata);
if (hFind != INVALID_HANDLE_VALUE)
{
do
{
if (strcmp(fdata.cFileName, ".") != 0 &&
strcmp(fdata.cFileName, "..") != 0)
{
if (fdata.dwFileAttributes & FILE_ATTRIBUTE_DIRECTORY)
{
continue; // a diretory
}
else
{
files_.push_back(fdata.cFileName);
}
}
}
while (FindNextFile(hFind, &fdata) != 0);
} else {
cerr << "can't open directory\n";
return;
}
if (GetLastError() != ERROR_NO_MORE_FILES)
{
FindClose(hFind);
cerr << "some other error with opening directory: " << GetLastError() << endl;
return;
}
FindClose(hFind);
hFind = INVALID_HANDLE_VALUE;
#endif
file_names.clear();
file_names = files_;
}
Enjoy
Roy.
 While looking for a very simple way to start up an OpenGL visualizer for quick 3D hacks, I discovered an excellent library called libQGLViewer, and I want to quickly show how easy it is to setup a 3D environment with it. This library provides an easy to access and feature-rich QtWidget you can embed in your UIs or use stand-alone (this may sound like a marketing thing, but they are not paying me anything 🙂
While looking for a very simple way to start up an OpenGL visualizer for quick 3D hacks, I discovered an excellent library called libQGLViewer, and I want to quickly show how easy it is to setup a 3D environment with it. This library provides an easy to access and feature-rich QtWidget you can embed in your UIs or use stand-alone (this may sound like a marketing thing, but they are not paying me anything 🙂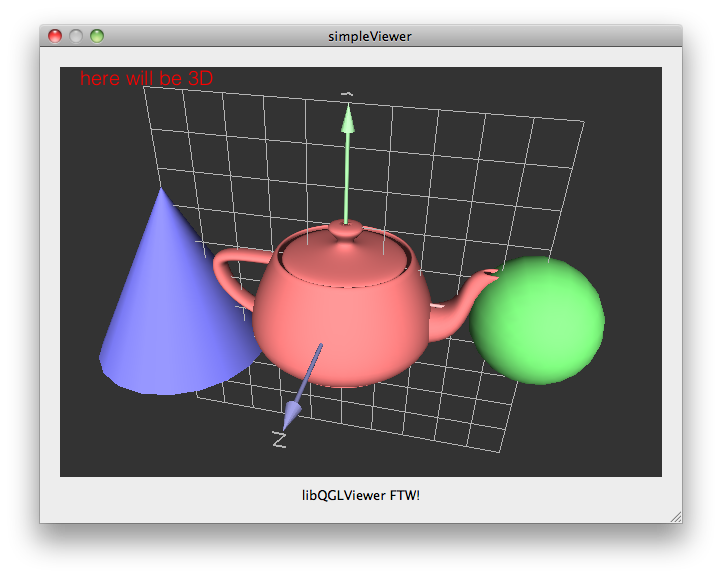
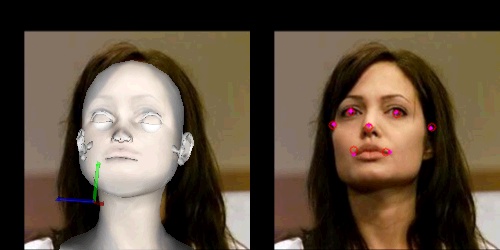
 So I was contacted earlier by someone asking about the Head Pose Estimation work I put up a while back. And I remembered that I needed to go back to that work and fix some things, so it was a great opportunity.
So I was contacted earlier by someone asking about the Head Pose Estimation work I put up a while back. And I remembered that I needed to go back to that work and fix some things, so it was a great opportunity.