|
import cv2 |
|
import numpy as np |
|
|
|
def cylindricalWarp(img, K): |
|
"""This function returns the cylindrical warp for a given image and intrinsics matrix K""" |
|
h_,w_ = img.shape[:2] |
|
# pixel coordinates |
|
y_i, x_i = np.indices((h_,w_)) |
|
X = np.stack([x_i,y_i,np.ones_like(x_i)],axis=-1).reshape(h_*w_,3) # to homog |
|
Kinv = np.linalg.inv(K) |
|
X = Kinv.dot(X.T).T # normalized coords |
|
# calculate cylindrical coords (sin\theta, h, cos\theta) |
|
A = np.stack([np.sin(X[:,0]),X[:,1],np.cos(X[:,0])],axis=-1).reshape(w_*h_,3) |
|
B = K.dot(A.T).T # project back to image-pixels plane |
|
# back from homog coords |
|
B = B[:,:-1] / B[:,[-1]] |
|
# make sure warp coords only within image bounds |
|
B[(B[:,0] < 0) | (B[:,0] >= w_) | (B[:,1] < 0) | (B[:,1] >= h_)] = -1 |
|
B = B.reshape(h_,w_,-1) |
|
|
|
img_rgba = cv2.cvtColor(img,cv2.COLOR_BGR2BGRA) # for transparent borders... |
|
# warp the image according to cylindrical coords |
|
return cv2.remap(img_rgba, B[:,:,0].astype(np.float32), B[:,:,1].astype(np.float32), cv2.INTER_AREA, borderMode=cv2.BORDER_TRANSPARENT) |
|
|
|
if __name__ == '__main__': |
|
img = cv2.imread("image.png") |
|
h, w = img.shape[:2] |
|
K = np.array([[800,0,w/2],[0,800,h/2],[0,0,1]]) # mock intrinsics |
|
img_cyl = cylindricalWarp(img, K) |
|
cv2.imwrite("image_cyl.png", img_cyl) |

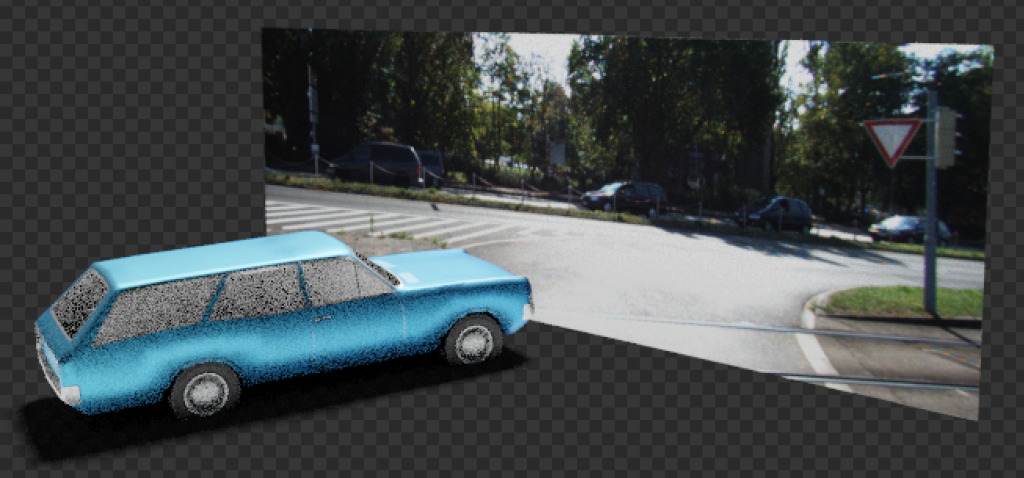
 – I’ve augmented the image. Turns out it needs a bit more of Blender trickery. This is the real reason for this post.
– I’ve augmented the image. Turns out it needs a bit more of Blender trickery. This is the real reason for this post.


 by
by